Congratulations to Dr Ceron
08/06/22: Big congratulations to Dr. Steven Ceron who successfully defended his PhD thesis in Mechanical Engineering today, on the topic of “Enabling Local-to-Global Behaviors in Collectives Across Length Scales“. Dr. Ceron is the first student out of the CEI-lab to earn his PhD and will be moving on to do a Postdoc with Prof. Rus at MIT in the Fall!

Find us @ICRA2022
23/5/22: The CEI-lab is present all during ICRA, please find us near the coffee, by the pool, or join us for any of the following events:
Monday May 23rd:
- Kirstin Petersen is co-organizing a workshop on Workshop on Modular Self-Reconfigurable Robots
- Steven Ceron is presenting on Soft Modular Robots at the MSRR Workshop.(13:30-13:50)
- Alli Nilles is co-organizing a workshop on Robotics and Art: Automating Expressions
- Kirstin Petersen is presenting on Locomotion in Soft Modular Robots at the Challenges and Opportunities of Bio-Inspired Design, Actuation, and Locomotion (10-10:20)
Tuesday May 24th:
- Kirstin Petersen is chairing the session on Robotics and Automation in Agriculture and Forestry (15:30-16:50)
- Haron Abdel-Raziq is presenting his paper on “Mapping Unknown Environments With Instrumented Honey Bees” (TuB04.12, 16:35-16:40) and his poster at Session 2 16:50-18:00
- Robby Huang is presenting his paper on “Construction and Excavation by Collaborative Double-Tailed SAW Robots” (TuB14.03 15:40-15:45) and Kathleen Wang and Robby will be presenting their poster at Session 2 16:50-18:00
Friday May 27th:
- Kirstin Petersen is co-organizing a workshop on Workshop on Collective Robotic Construction
- Jiahe Chen is presenting on Errors in Collective Robotic Construction at the CRC Workshop (11:58-12:05) and a poster (15:30-16:30)
- Robby Huang is presenting on Recent Work on Construction and Excavation by Double-Tailed SAW Robots at the CRC Workshop (11:44-11:51) and a poster (15:30-16:30)
- Alli Nilles is co-organizing a workshop on Compositional Robotics: Mathematics and Tools
- Jonathan Jaramillo is presenting on “Towards Low-cost, Vision-based Estimation of Yield and Crop Load in Vineyards” at the workshop on Agricultural Robotics and Automation
Ma passes A-exam
20/05/2022: Big congratulations to Danna Ma for passing her A-exam today!
Jaramillo passes A-exam
06/05/22: Big congratulations to Jonathan Jaramillo for passing his A-exam today!
Nature Comms
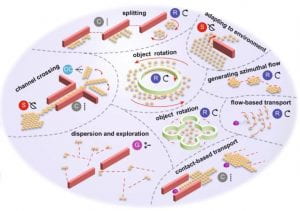
26/04/22: Huge congratulations to Steven Ceron for getting his paper on “Microrobot collectives with reconfigurable morphologies, behaviors, and functions” published in Nature Communications today! This is the result of a 6 month long collaboration with the Physical Intelligence Department at the Max Planck Institute in Germany.
AROB
21/2/2022: Big congratulations to Zoe Du, Zach Brothers, and Leah Valdes, as well as Jack Defay and Jake Peters for having their Symposium presentations at SWARM 2021 accepted to the special issue of Artificial Life and Robotics (AROB).
RoboSoft 2022
10/02/2022: Big congratulations to Postdoc Alli Nilles for getting her work on “Strain-Based Consensus in Soft, Inflatable Robots” accepted to the Intl. Conference for Soft Robotics!

ICRA 2022 Papers and Workshops
31/01/2022: Big congratulations to graduate students Haron Abdel-Raziq and Daniel Palmer for getting their work on “Mapping Unknown Environments With Instrumented Honey Bees” and to undergraduates Robby Huang, Alex Zhu, and Kathleen Wang for getting their work on “Construction and Excavation by Collaborative Double-Tailed SAW Robots” accepted to ICRA 2022!
Beyond these presentations, the CEI-lab are also helping to organize four workshops on Workshop on Collective Robotic Construction, Workshop on Modular Self-reconfigurable Robots, Robotics and Art: Automating Expressions, and Compositional Robotics: Mathematics and Tools – hope you can join us!
ELI Award
10/01/2022: Congratulations to undergraduate Elizabeth Garner for receiving an Engineering Learning Initiative Award to support her work on collective behaviors in shape morphing particles!
RA-L / ICRA
5/1/2022: Big congratulations to undergraduates Robby Huang, Alex Zhu, and Kathleen Wang for getting their work on “Construction and Excavation by Collaborative Double-Tailed SAW Robots” accepted to RA-Letters with an ICRA 2022 presentation!