
Research
In swarm robotics, interactions between large numbers of individually simple robots lead to complex global behaviors. The inspiration comes from social insects such as ants and bees in nature, where thousands and even millions of individuals coordinate to handle advanced tasks like food supply, brood care, predator defense, and nest construction. Not only are colonies able to do this without a central point of coordination, they are able to do so in a remarkably scalable and error tolerant manner. Likewise, compared to traditional single-robot systems, robot swarms have the ability to address tasks beyond the reach of single robots, and promise more efficient parallel operation and greater robustness due to redundancy. Our goal is twofold; to design tools to help analyze and learn from social insects in nature, and using this knowledge to implement robotic swarms capable of long-term autonomous behavior in complicated real-life settings.
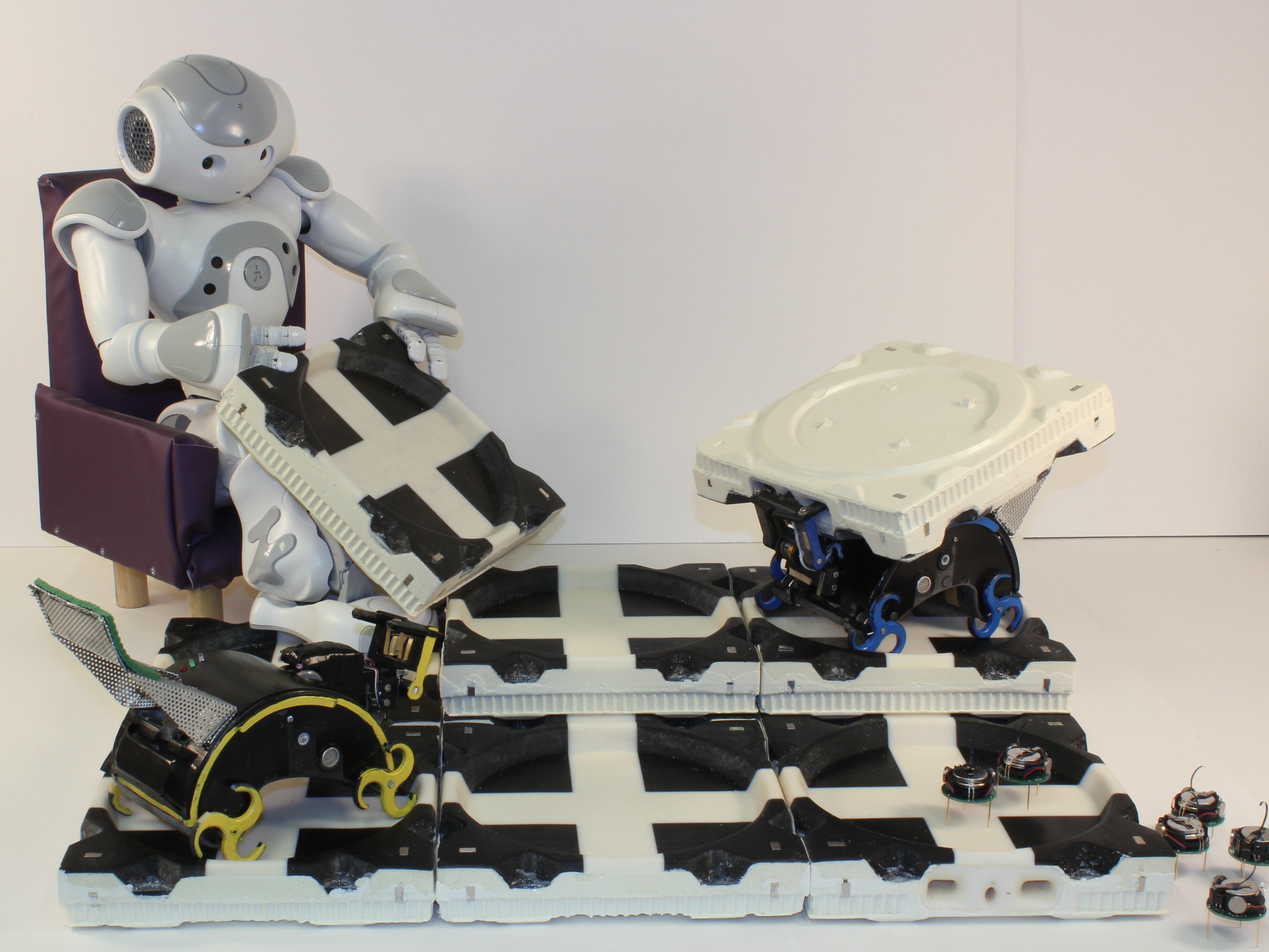
A major focus of the CEI-lab is autonomous construction. This challenge offers a unique opportunity to develop, or rather assemble, the world in which the robots operate, i.e. the structure and material. This can help limit the complexity of mechanics and control, decreasing the amount of sensory stimuli needed for the robots to make decisions, much like insects do when they create their own living quarters. As a future application area, bringing automation to construction has the potential to improve its speed and efficiency, to remove humans from hazardous environments, and to enable building in settings where it is difficult for humans to work, e.g., extraterrestrial terrain, areas of extreme climate, or even under the sea.
